Opencv主要模块和基本操作

主要模块
OpenCV中的函数接口大体可以分为如下部分:
- core:核心模块,主要包含了OpenCV中最基本的结构(矩阵,点线和形状等),以及相关的基础运算/操作。
- imgproc:图像处理模块,包含和图像相关的基础功能(滤波,梯度,改变大小等),以及一些衍生的高级功能(图像分割,直方图,形态分析和边缘/直线提取等)。
- highgui:提供了用户界面和文件读取的基本函数,比如图像显示窗口的生成和控制,图像/视频文件的IO等。
如果不考虑视频应用,以上三个就是最核心和常用的模块了。针对视频和一些特别的视觉应用,OpenCV也提供了强劲的支持:
- video:用于视频分析的常用功能,比如光流法(Optical Flow)和目标跟踪等。
- calib3d:三维重建,立体视觉和相机标定等的相关功能。
- features2d:二维特征相关的功能,主要是一些不受专利保护的,商业友好的特征点检测和匹配等功能,比如ORB特征。
- object:目标检测模块,包含级联分类和Latent SVM
- ml:机器学习算法模块,包含一些视觉中最常用的传统机器学习算法。
- flann:最近邻算法库,Fast Library for Approximate Nearest Neighbors,用于在多维空间进行聚类和检索,经常和关键点匹配搭配使用。
- gpu:包含了一些gpu加速的接口,底层的加速是CUDA实现。
- photo:计算摄像学(Computational Photography)相关的接口,当然这只是个名字,其实只有图像修复和降噪而已。
- stitching:图像拼接模块,有了它可以自己生成全景照片。
- nonfree:受到专利保护的一些算法,其实就是SIFT和SURF。
- contrib:一些实验性质的算法,考虑在未来版本中加入的。
- legacy:字面是遗产,意思就是废弃的一些接口,保留是考虑到向下兼容。
- ocl:利用OpenCL并行加速的一些接口。
- superres:超分辨率模块,其实就是BTV-L1(Biliteral Total Variation – L1 regularization)算法
- viz:基础的3D渲染模块,其实底层就是著名的3D工具包VTK(Visualization Toolkit)。
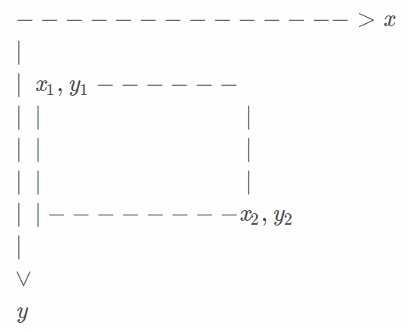
opencv中的坐标系
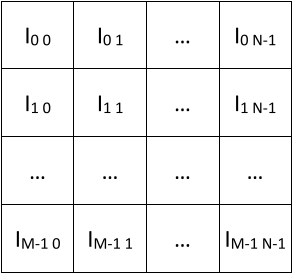
处理图像
- 图像存储采用的二维数组,其中
灰度图–数组值类型CV_8U
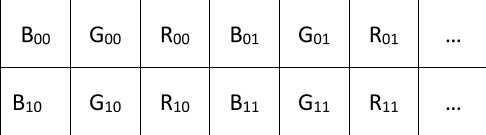
RGB 图–注意存储顺序为BGR
常用函数
- 读取数字图像
cv2.imread(path_of_image, intflag)path_of_image:需要读入图像的完整的路径
intflag:以什么形式读入图像
[· cv2.IMREAD_COLOR: 加载彩色图像。任何图像的透明度都将被忽略。它是默认标志
· cv2.IMREAD_GRAYSCALE:以灰度模式加载图像
· cv2.IMREAD_UNCHANGED:保留读取图片原有的颜色通道]
- 在窗口中显示图像
cv2.imshow(windows_name, image)windows_name:窗口名称(字符串)
Image:图像对象,类型是numpy中的ndarray类型
第二个参数还可以imutils.resize(image, windows_size)
- 保存图像到本地
cv2.imwrite(image_filename, image)销毁窗口(否则程序将无法正常终止)
cv2.destroyWindow(windows_name)#销毁单个特定窗口cv2.destroyAllWindows()#销毁全部窗口,无参数
设置销毁条件
cv2.waitKey(time_of_milliseconds(整数))time_of_milliseconds > 0 :此时表示时间,单位是毫秒,含义表示等待*毫秒后图像将自动销毁
if cv2.waitKey(10000): cv2.destroyAllWindows()time_of_milliseconds <= 0 : 此时图像窗口将等待一个键盘敲击,接收到指定的键盘敲击便会进行窗口销毁
#当指定waitKey(0) == 27时当敲击键盘 Esc 时便销毁所有窗口
if cv2.waitKey(0) == 27: cv2.destroyAllWindows()#当接收到键盘敲击A时,便销毁名称为’origin image’的图像窗口
if cv2.waitKey(-1) == ord(‘A’): cv2.destroyWindow(‘origin image’)色彩空间变换函数
cv2.cvtColor(input_image, flag)
常用flag:
· cv2.COLOR_BGR2GRAY: 表示将图像从BGR空间转化成灰度图
· cv2.COLOR_BGR2HSV: 表示将图像从RGB空间转换到HSV空间
查看其它类型:
flags = [i for i in dir(cv2) if i.startswith(‘COLOR_’)] print(flags)
绘制图像
一些操作中的公共参数
img: 表示需要进行绘制的图像对象ndarray
color: 表示绘制几何图形的颜色,采用BGR即上述说的(B、G、R)
thickness: 表示绘制几何图形中线的粗细,默认为1,对于圆、椭圆等封闭图像取-1时是填充图形内部
lineType : 表示绘制几何图形线的类型,默认8-connected线是光滑的,当取cv2.LINE_AA时线呈现锯齿状
cv2.line(image, starting, ending, color, thickness, lineType) #starting:线的起点像素坐标 #ending:终点像素坐标
cv2.rectangle(image, top-left, bottom-right, color, thickness, lineType) #top-left、bottom-right分别表示长方形的左上角像素坐标、右下角像素坐标
cv2.circle(image, center, radius, color, thickness, lineType) #center、radius分别表示圆的圆心像素坐标、圆的半径长度 #thickness = -1 时绘制的是实心圆,当thickness >= 0 时绘制的是空心圆